



技术资料
安川机器人平移(偏移)功能
安川机器人平移(偏移)功能
平移是指对象物的各点从固定位置开始等距移动。下图中,移动量可使用距离L(三维坐标位移)定义。在示教作业中,也可使用平移功能示教轨迹(或位置)来减轻示教作业量。
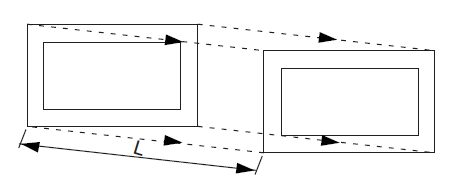
下图的例子中,可将示教位置A每次平移距离L(机器人可识别的X、Y、Z三维位移),以实现在B~G的位置上执行A处示教的程序。

除此外,偏移不仅可以针对某些点位进行偏移,也可以对调用的程序进行偏移,从SFTON命令到SFTOF 命令是移动的对象区间。

图1、点位偏移
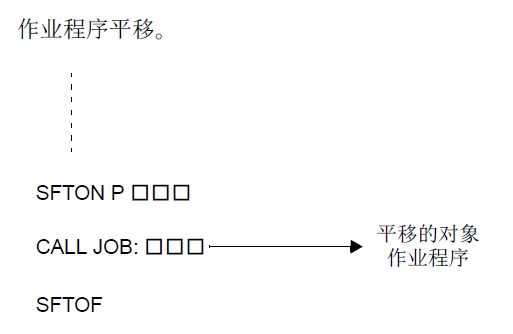
图2、程序偏移
图2、程序偏移
平移量的建立
平移量是平移位置和示教位置X、Y、Z坐标值的差,以及RX、RY、RZ角度位移的差(通常为“0”)。平移时的平移量就是在各坐标系中X、Y、Z的增量,坐标系有四种:基座坐标,机器人坐标,工具坐标,用户坐标(在没有基座轴的系统中,基座坐标和机器人坐标为同一坐标,不能使用示教线坐标)。平移量在位置型变量P中设定,此时可以利用机器人的当前位置(坐标)来确定平移前后的距离,或者条件允许的话可以直接测量出偏移距离,然后登陆在合适的P变量中,以利用当前位置的方法举例:
示教的当前位置为X:100,Y:100,Z:100
偏移后的当前位置为X:200,Y:100,Z:200
那么就可以将两个位置的差值X:100,Y:0,Z:100写入某个P变量中,比如P000,切记用的坐标系必须保持统一,然后在偏移指令SFT0N后面的偏移量写入P000即可。

码垛等进行等间距平移时,求出示教位置和***终平移位置的差,然后除以间距数(分割数),即求得一个间距平移量。

实际案例如下:

了解更多安川机器人
文章来源网络,如有侵权请联系删除
