



技术资料
安川机器人全轴角度显示功能
使用全轴角度显示功能,可在特定画面中,将原本以脉冲形式显示的机器人位置数据以角度形式显示。
01功能设置有效
本功能有效时可在以下场景中显示机器人的***角度或者对地角度:
当前值(显示的坐标系为“基座”、“机器人”、“用户” 时无法使用)
指令值
作业原点位置
第 2 原点位置
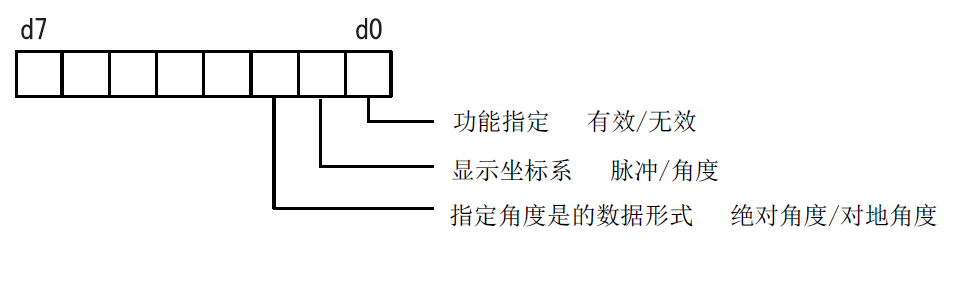
可在示教器主菜单中的【设置】【操作条件设定】【全轴角度显示功能】中设定功能的有效/无效;或者通过参数 S2C684 = 1,来设置功能有效。
S2C684 = 1 (全轴显示功能有效)
S2C684 = 3 (显示***角度)
S2C684 = 7 (显示对地角度)
02功能应用举例
本功能设为有效时,在目标画面下选择菜单中的【显示】后,就会显示【脉冲显示】【***角度】【对地角度】这三个菜单。选择其中一种后,显示中的数据就会更改为选择的数据形式。以主菜单中【当前位置】画面为例:

脉冲显示
显示各轴的脉冲数据。

***角度显示
脉冲为 0时为 0[deg.],显示各轴的独立角度。

对地角度显示
对于L、U轴,以机器人的安装方向为基准方向显示其角度。即使轴不
动作,有时也会由于机器人姿势不同,而导致数值变动。

对于行走轴等直线运动的外部工装轴,选择上述角度显示时,显示的是位置 ( 单位[mm]) 而不是角度。
了解更多安川机器人
文章来源网络,如有侵权请联系删除
