



技术资料
安川机器人防碰撞传感器的连接方法
为了实现安川机器人的防碰撞功能,可以通过两种方法来连接外部传感器,以下分别介绍;另外报警的解除方法也会在本文中进行介绍。
直接连接外部碰撞传感器
1. 在控制柜柜门内的机械安全I/O逻辑基板处,把短接的「SHOCK-」和「+24V2」插针拆开(因防碰撞传感器是选装件,所以标准机器人的机内防碰撞传感器的电缆不连接到防碰撞传感器上)。
*防碰撞传感器连接用的针端子在控制柜内侧右面。
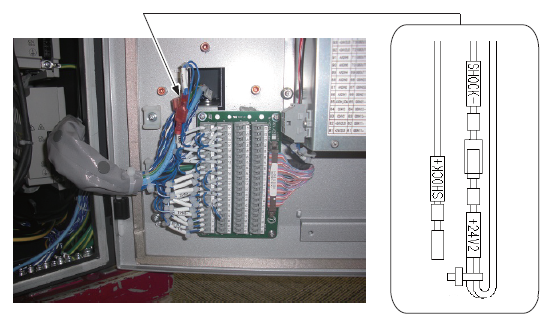
2. 把防碰撞传感器的信号线分别接到上述拆掉的插针端子“SHOCK-”、“+24V2”上。
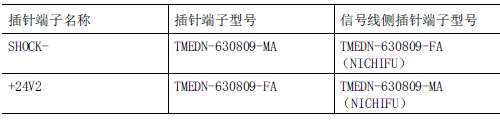
*防碰撞传感器的信号线末端处理请准备下列样式的针端子。

PS:
此方法一般用于客户外购防碰撞传感器,然后安装于必要位置。
使用机内电缆配线连接防碰撞传感器
1. 在控制柜柜门内的机械安全I/O逻辑基板处,把短接的「SHOCK-」和「+24V2」插针拆开(因防碰撞传感器是选装件,所以标准机器人的机内防碰撞传感器的电缆不连接到防碰撞传感器上)。
*防碰撞传感器连接用的针端子在控制柜内侧右面。
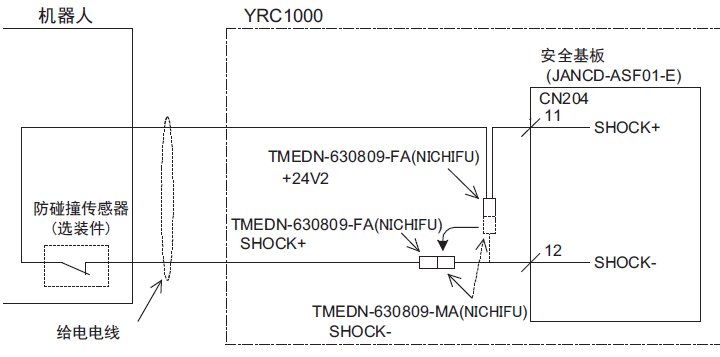
2.连接已拆掉的插针端子“SHOCK-”与机器人的防碰撞传感器“SHOCK+”。
PS:
此方法一般用于安川弧焊机器人,焊枪自带防碰撞传感器,因此可以直接通过此方法连接。
防碰撞传感器作用时设置方法
使用防碰撞传感器的输入信号时,可以指定机器人的停止方法。
停止方法有“急停”和“控制” 两种,通过示教编程器可以选择停止方法。
1. 选择主菜单的【机器人】
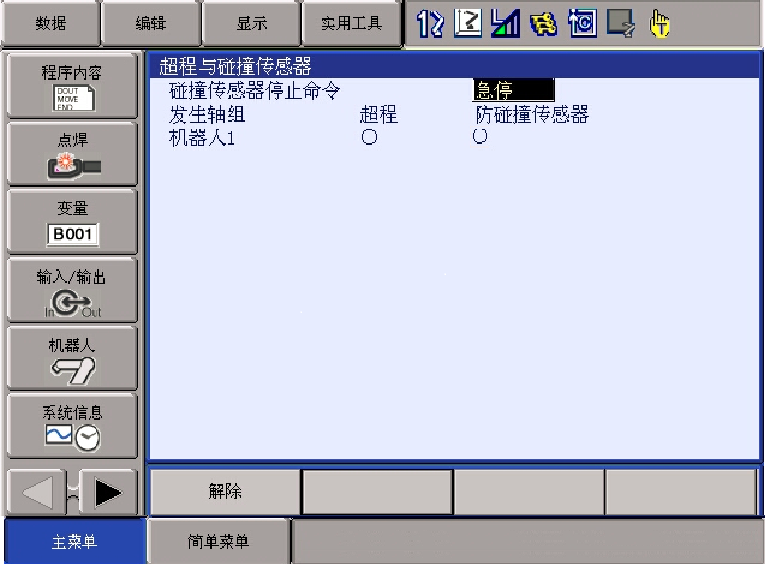
2. 选择【超程与碰撞传感器】
显示超程与防碰撞传感器解除画面。
– 通过“碰撞传感器停止命令”可把正在工作的防碰撞传感器检测的停止条件设定成“急停”或“控制”中的任意一项。
– 每次按下[选择],“急停”和“控制”会交替切换。
文章来源网络,如有侵权请联系删除
